در دنیای پیشرفتهی امروز، رباتها نقش مهمی در صنایع، پزشکی، حملونقل، آموزش و حتی زندگی روزمرهی انسانها ایفا میکنند. اما آنچه کمتر به آن توجه میشود، ساختار مکانیکی رباتهاست که مستقیماً بر عملکرد، دقت، سرعت و نوع کاربرد آنها تأثیر دارد. در این مقاله، به بررسی چهار نوع از رایجترین ساختارهای مکانیکی رباتها میپردازیم: بازویی (Articulated)، کارتزین (Cartesian)، استوانهای (Cylindrical) و موازی (Parallel).
۱. رباتهای بازویی (Articulated Robots
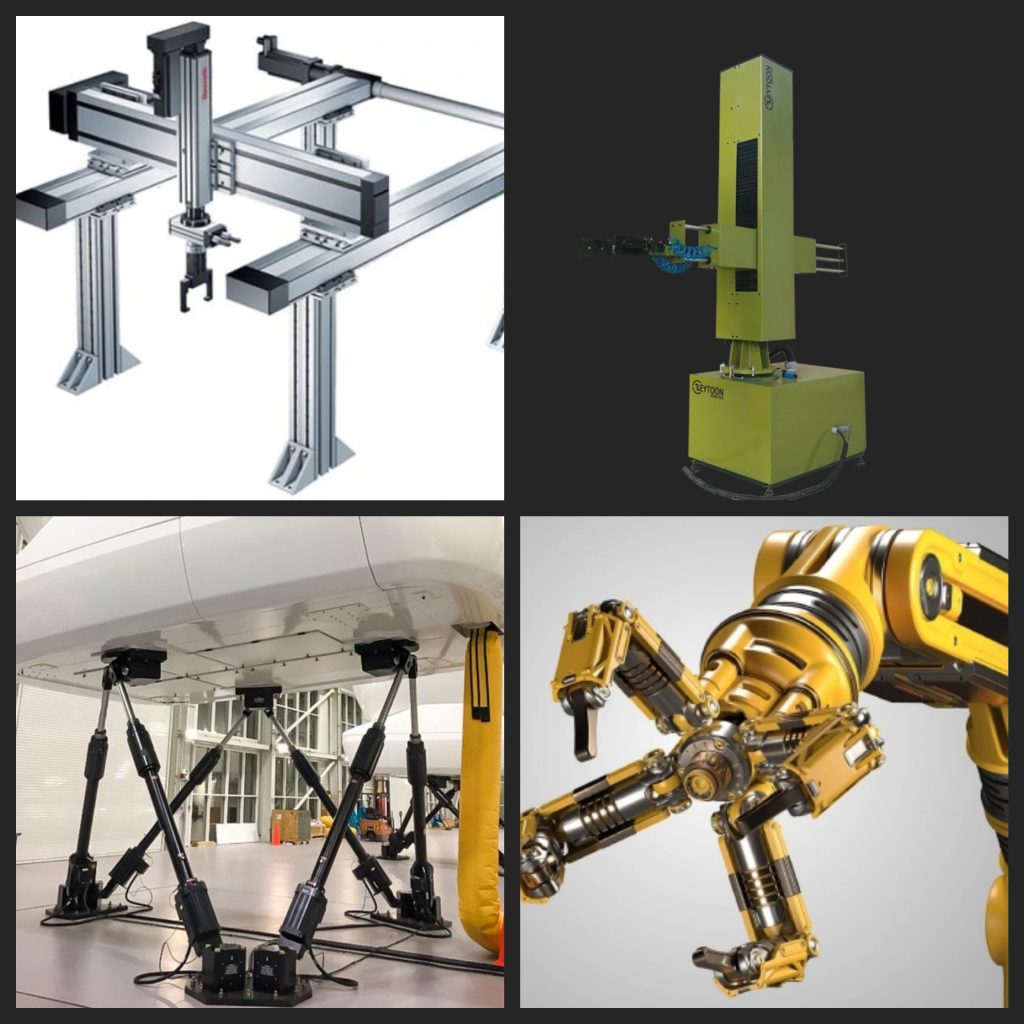
رباتهای بازویی یکی از پرکاربردترین و پیشرفتهترین ساختارهای مکانیکی هستند. این نوع ربات دارای مفاصل چندگانه است که معمولاً ۶ محور یا بیشتر دارند. مانند یک بازوی انسان، هر مفصل به یک موتور الکتریکی متصل است که امکان چرخش، جابهجایی و انجام حرکات پیچیده را فراهم میکند.
نمونهها:
• بازوهای رباتیک در خطوط مونتاژ خودرو
• رباتهای جوشکاری در کارخانههای فولاد
• رباتهای نقاش صنعتی
مزایا:
• محدودهی حرکتی بالا
• توانایی انجام حرکات دقیق و پیچیده
• سازگار با وظایف مختلف صنعتی
معایب:
• هزینهی بالا
• نیاز به برنامهنویسی پیچیده
۲. رباتهای کارتزین (Cartesian Robots)
رباتهای کارتزین بر پایهی سیستم مختصات X, Y, Z عمل میکنند. این ساختار ساده و مستقیم، آنها را برای کارهایی با حرکت خطی دقیق بسیار مناسب میسازد. برخلاف رباتهای بازویی، این نوع ربات معمولاً فاقد مفاصل گردان است.
نمونهها:
• چاپگرهای سهبعدی (3D Printers)
• دستگاههای CNC در صنایع فلزکاری
• ماشینهای ترسیم خودکار
مزایا:
• طراحی ساده
• سهولت در برنامهریزی
• دقت حرکتی بالا در یک محدوده مشخص
معایب:
• محدودیت در زاویههای حرکت
• نیاز به فضای زیاد برای نصب
۳. رباتهای استوانهای (Cylindrical Robots
این رباتها از ترکیب حرکت خطی و چرخشی در اطراف یک محور استوانهای بهره میبرند. به دلیل طراحی خاصشان، تحمل بار بالایی دارند و اغلب در محیطهای کاری سنگین مورد استفاده قرار میگیرند.
نمونهها:
• دستگاههای تراش خودکار
• خطوط بستهبندی صنعتی
مزایا:
• قابلیت تحمل بار سنگین
• مناسب برای جابهجایی عمودی-افقی
معایب:
• محدودیت در دامنهی حرکات پیچیده
• کاربرد محدودتر نسبت به رباتهای بازویی
۴. رباتهای موازی (Parallel Robots)
رباتهای موازی، برخلاف ساختارهای سری، از چند بازو بهصورت موازی استفاده میکنند که همزمان روی یک سکو یا ابزار اثرگذار عمل میکنند. این طراحی منحصربهفرد منجر به پایداری بالا، سرعت زیاد و دقت چشمگیر میشود.
نمونهها:
• شبیهسازهای پرواز
• دستگاههای تست لرزش
• برخی از پرینترهای سهبعدی دقیق
مزایا:
• سرعت بالا و پاسخ سریع
• پایداری مکانیکی قوی
• مصرف انرژی پایینتر
معایب:
• ساختار پیچیدهتر
• فضای محدود برای عملکرد ابزار
جمعبندی
شناخت ساختارهای مکانیکی مختلف رباتها به ما کمک میکند تا در طراحی، خرید یا استفاده از آنها، انتخاب دقیقتر و هوشمندانهتری داشته باشیم. هر ساختار ویژگیها و محدودیتهای خود را دارد و بسته به نیاز، یکی بر دیگری برتری دارد. آیندهی فناوری رباتیک بهسوی ترکیب هوش مصنوعی با ساختارهای پیشرفتهی مکانیکی حرکت میکند؛ جایی که رباتها نهتنها هوشمندتر، بلکه سریعتر، دقیقتر و امنتر خواهند بود.